Roboty współpracujące. Wybrane zagadnienia
Patrząc na dane zawarte w tab. 1, widzimy bezpieczne wartości energii kontaktu. Są one z przyczyn anatomicznych i fizjologicznych znacznie zróżnicowane. W wypadku wyposażenia robota w chwytak i dodatkowe obciążenie przenoszonym przedmiotem (jak to pokazano na rys. 2) należy uwzględnić wzrost masy układu uderzającego w osobę.
Ekr=Ekr+ch+d
gdzie:
Ekr – energia kinetyczna robota w wersji „fabrycznej”, z ramieniem nieobciążonym narzędziem i detalem,
Ekr+ch+d – energia kinetyczna robota pracującego, a więc z chwytakiem i detalem.

Stąd:
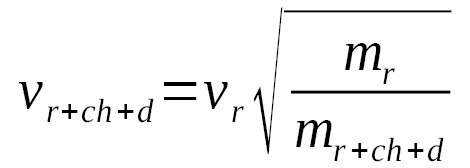
Z powyższego wzoru wynika, że w przypadku wzrostu poruszającej się masy (poprzez dodanie narzędzia i detalu) należy w celu zachowania bezpiecznej energii zredukować prędkość w stosunku do ilorazu pierwiastka drugiego stopnia masy samego ramienia robota do masy zwiększonej. Czyli przykładowo – czterokrotny wzrost masy musi pociągnąć za sobą dwukrotne zredukowanie prędkości.
Wartości obliczonych w ten sposób prędkości roboczych w praktyce przemysłowej dla większości aplikacji są niesatysfakcjonujące. Można takie rozwiązanie zaakceptować, jeżeli wyposażymy system z robotem współpracującym w czujnik identyfikujący wejście operatora w przestrzeń współpracy (rys. 1) powodujące natychmiastowe zwolnienie prędkości.
Czujniki kontaktu i funkcja zmniejszania siły
Można zastosować również inną strategię redukcji ryzyka, polegającą na wyposażeniu robota w czujniki [...]
którzy są subskrybentami naszego portalu.
i ciesz się dostępem do bazy merytorycznej wiedzy!

Dołącz do newslettera!
Co tydzień otrzymasz od nas porządną dawkę wiedzy o BHP i nie tylko!
- Nie ominą Cię najciekawsze newsy ze świata behapowców
- Przeczytasz bezpłatnie wybrane artykuły z „Promotora BHP”
- Będziesz wiedział, na jakich wydarzeniach spotka się nasza branża
- Wyślemy Ci kody, dzięki którym czasopisma i książki kupisz taniej
- Dowiesz się wcześniej o premierach wydawniczych i najlepszych promocjach